Reference: Google Scholar profile.
2026
-
ICLR 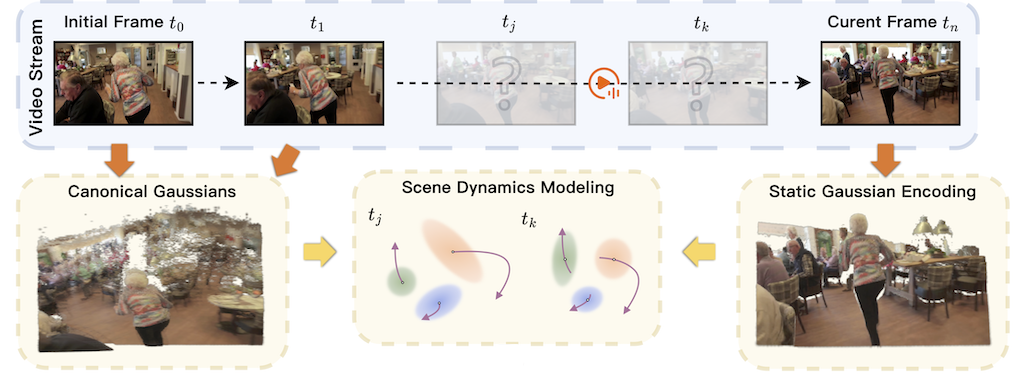
StreamSplat: Towards Online Dynamic 3D Reconstruction from Uncalibrated Video Streams
International Conference on Learning Representations, 2026.
2025
-
NeurIPS 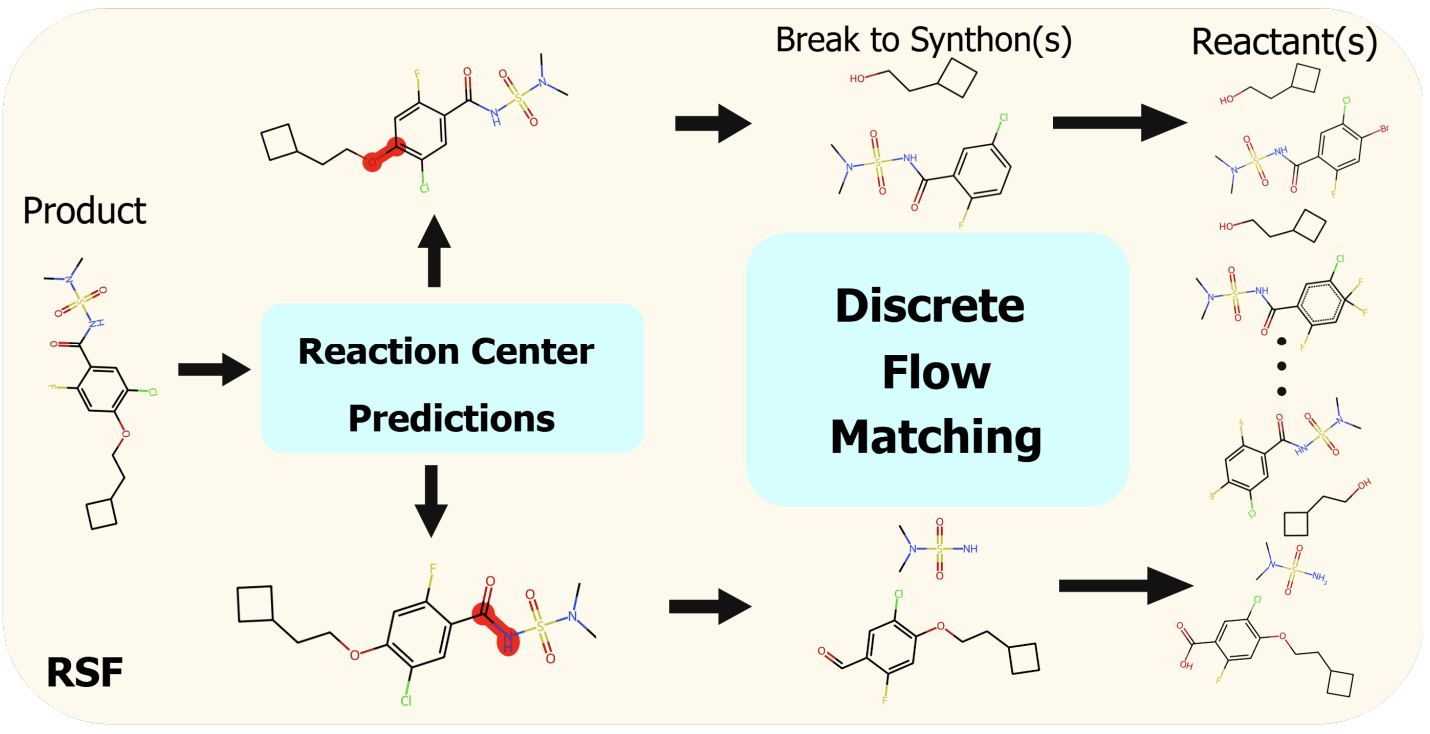
RETRO SYNFLOW: Discrete Flow Matching for Accurate and Diverse Single-Step Retrosynthesis
NeurIPS, 2025.
-
NeurIPS 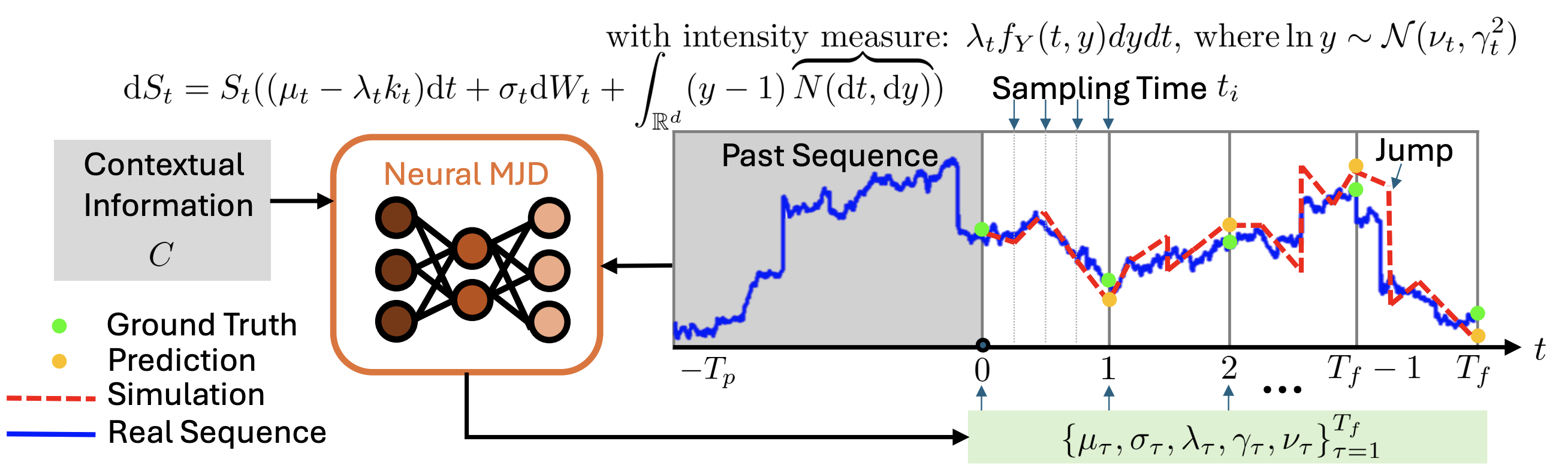
Neural MJD: Neural Non-Stationary Merton Jump Diffusion for Time Series Prediction
NeurIPS, 2025.
-
TMLR 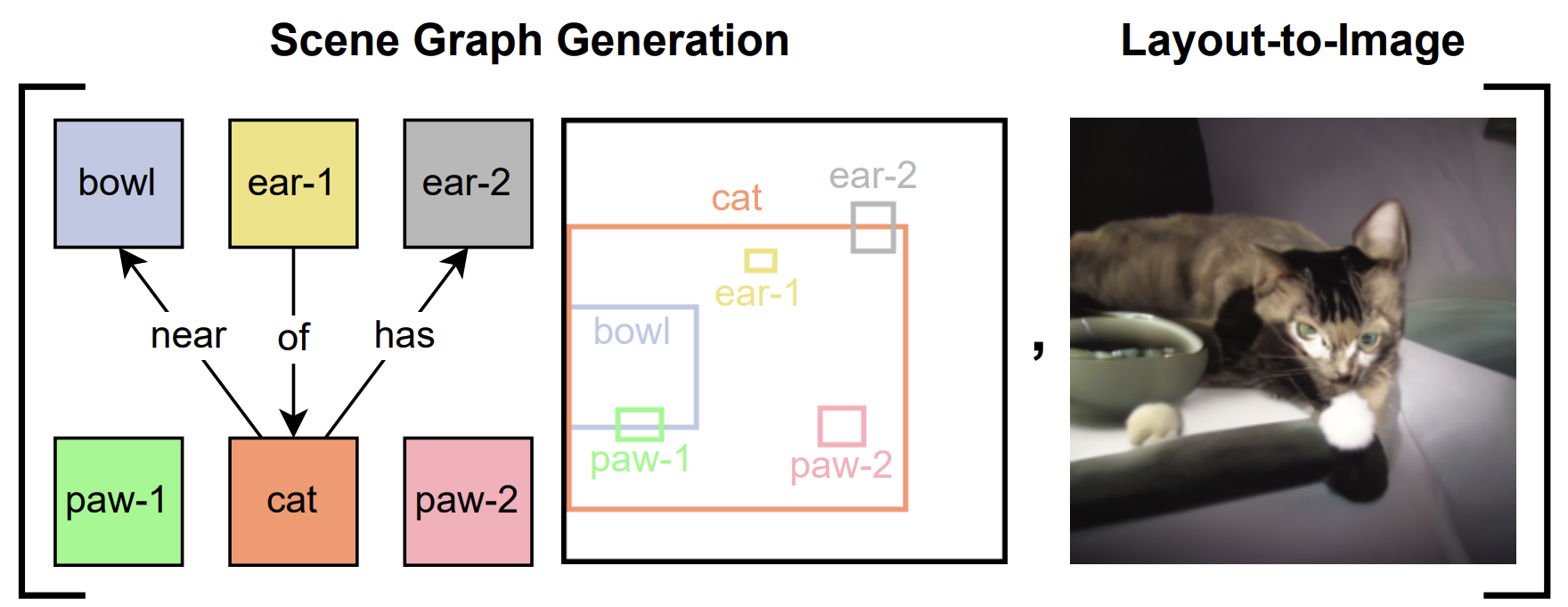
Joint Generative Modeling of Grounded Scene Graphs and Images via Diffusion Models
Transactions on Machine Learning Research, 2025.
-
IROS 
TrajFlow: Multi-modal Motion Prediction via Flow Matching
Qi Yan,
Brian Zhang,
Yutong Zhang,
Daniel Yang,
Joshua White,
Di Chen,
Jiachao Liu,
Langechuan Liu,
Binnan Zhuang,
Shaoshuai Shi, and
Renjie Liao Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2025.
-
CVPR 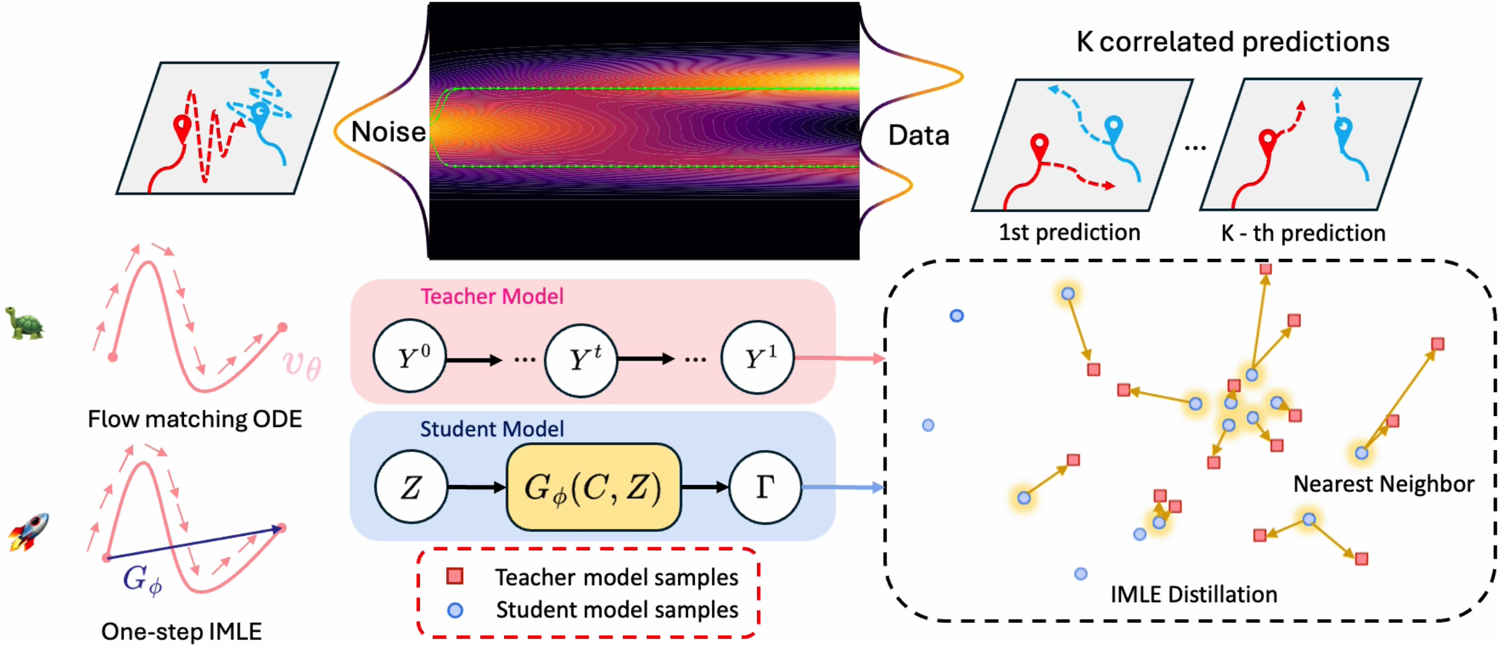
MoFlow: One-Step Flow Matching for Human Trajectory Forecasting via Implicit Maximum Likelihood Estimation based Distillation
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025.
2024
-
workshop 
Fréchet Video Motion Distance: A Metric for Evaluating Motion Consistency in Videos
ICML’24 Workshop on Controllable Video Generation, 2024.
-
TMLR 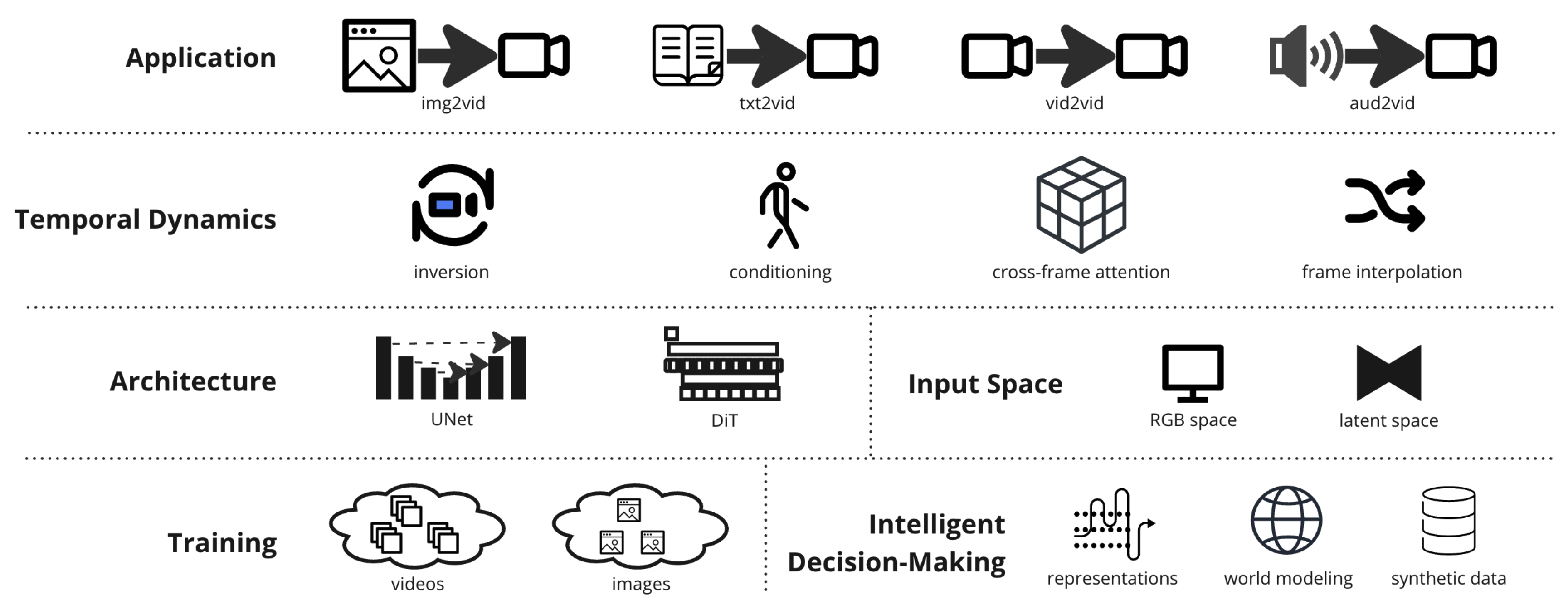
Video Diffusion Models: A Survey
Transactions on Machine Learning Research, 2024.
-
TMLR 
SwinGNN: Rethinking Permutation Invariance in Diffusion Models for Graph Generation
Transactions on Machine Learning Research, 2024.
-
ICLR 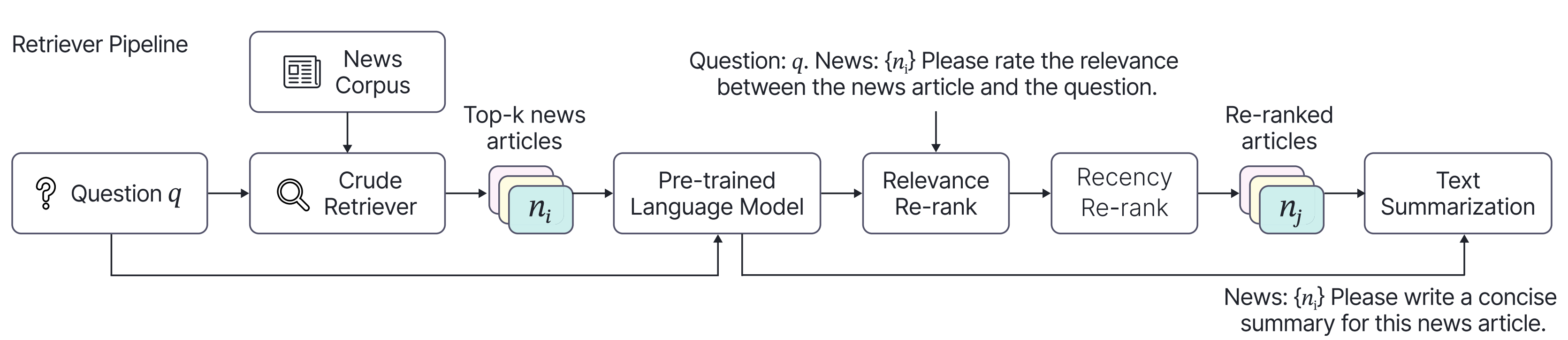
AutoCast++: Enhancing World Event Prediction with Zero-shot Ranking-based Context Retrieval
International Conference on Learning Representations, 2024.
2023
-
workshop 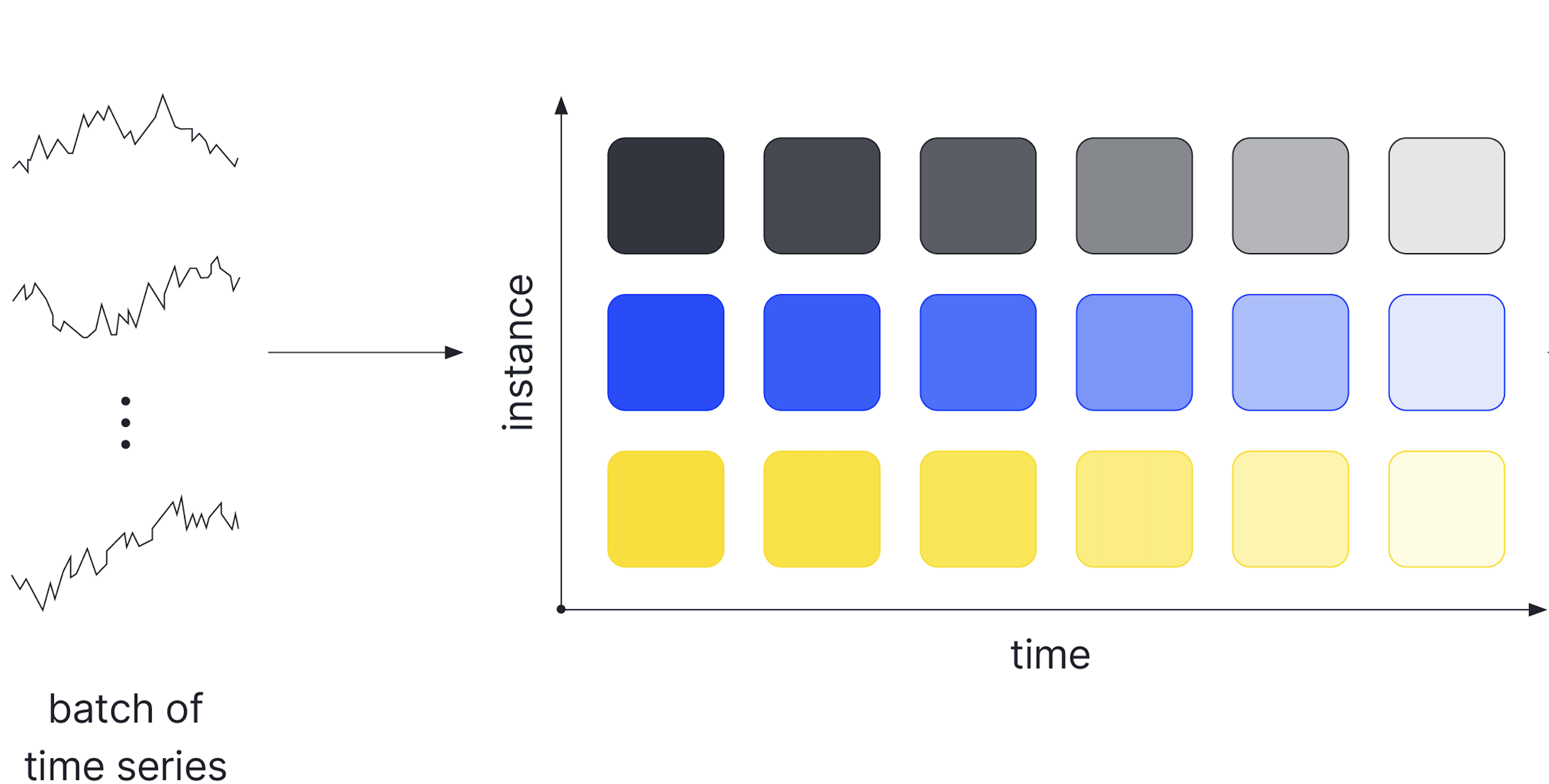
What Constitutes Good Contrastive Learning in Time-Series Forecasting?
IJCAI’23 Workshop-AI4TS: AI for Time Series Analysis, 2023.
2022
-
CVPR 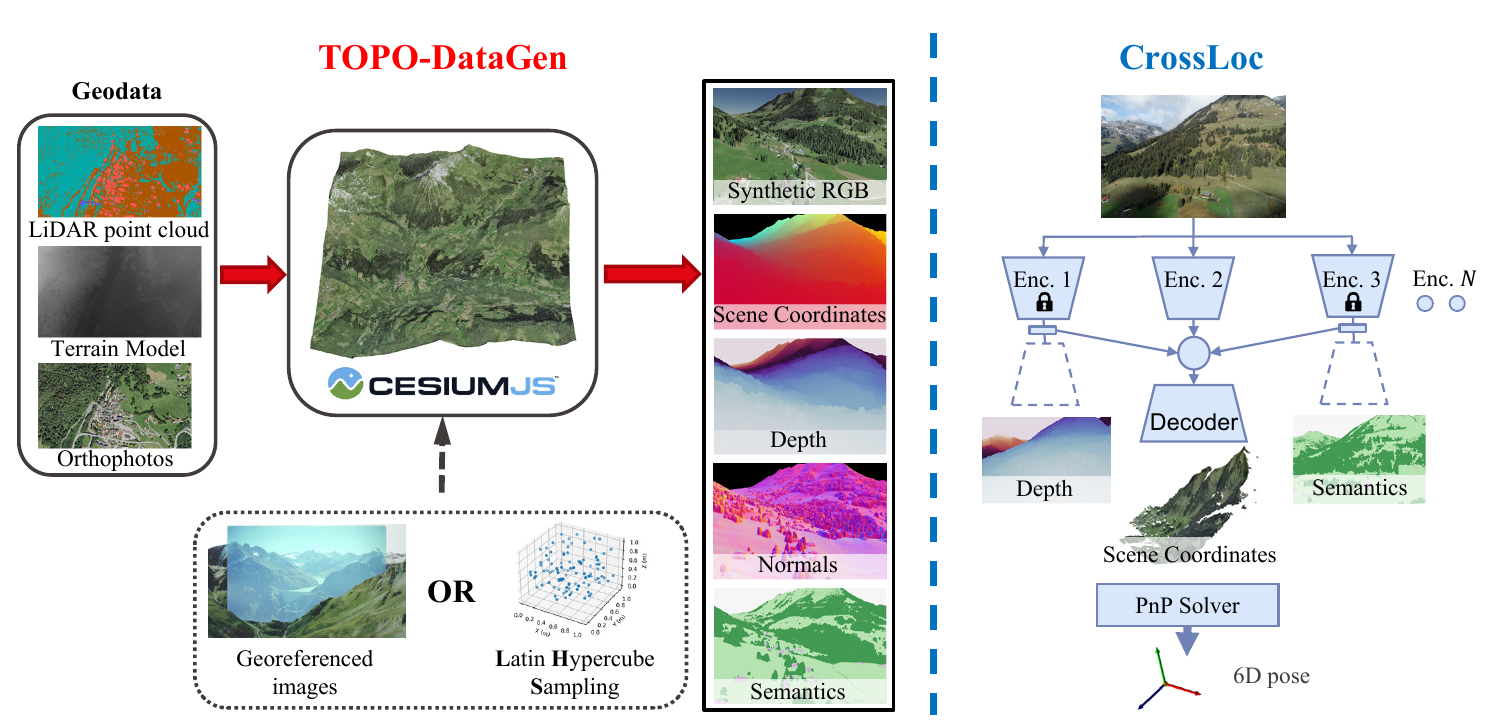
CrossLoc: Scalable Aerial Localization Assisted by Multimodal Synthetic Data
In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022.
-
dataset 
CrossLoc Benchmark Datasets
Dryad, 2022.
2021
-
ICCV 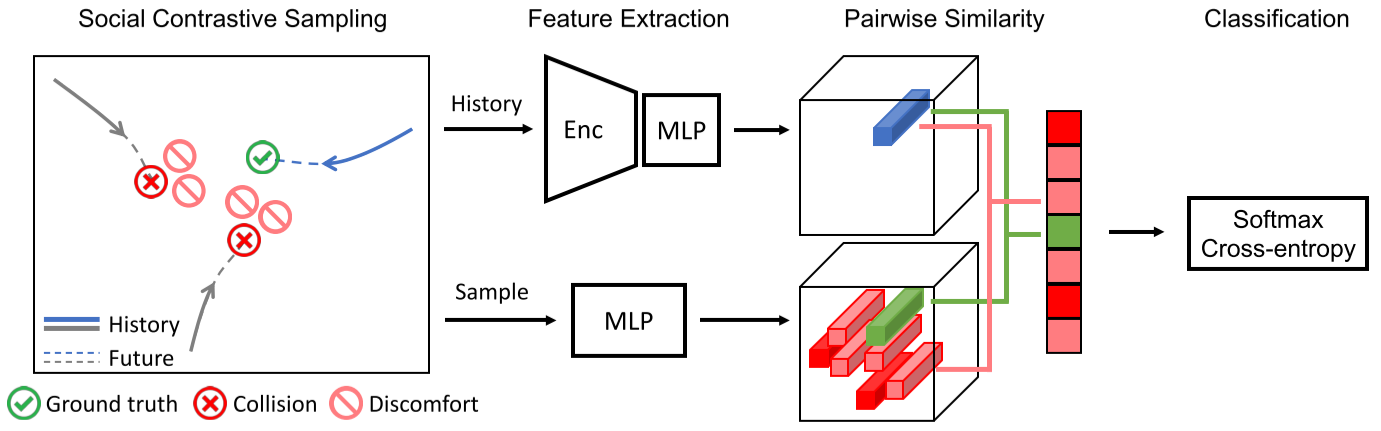
Social NCE: Contrastive Learning of Socially-aware Motion Representations
In Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021.
-
JET 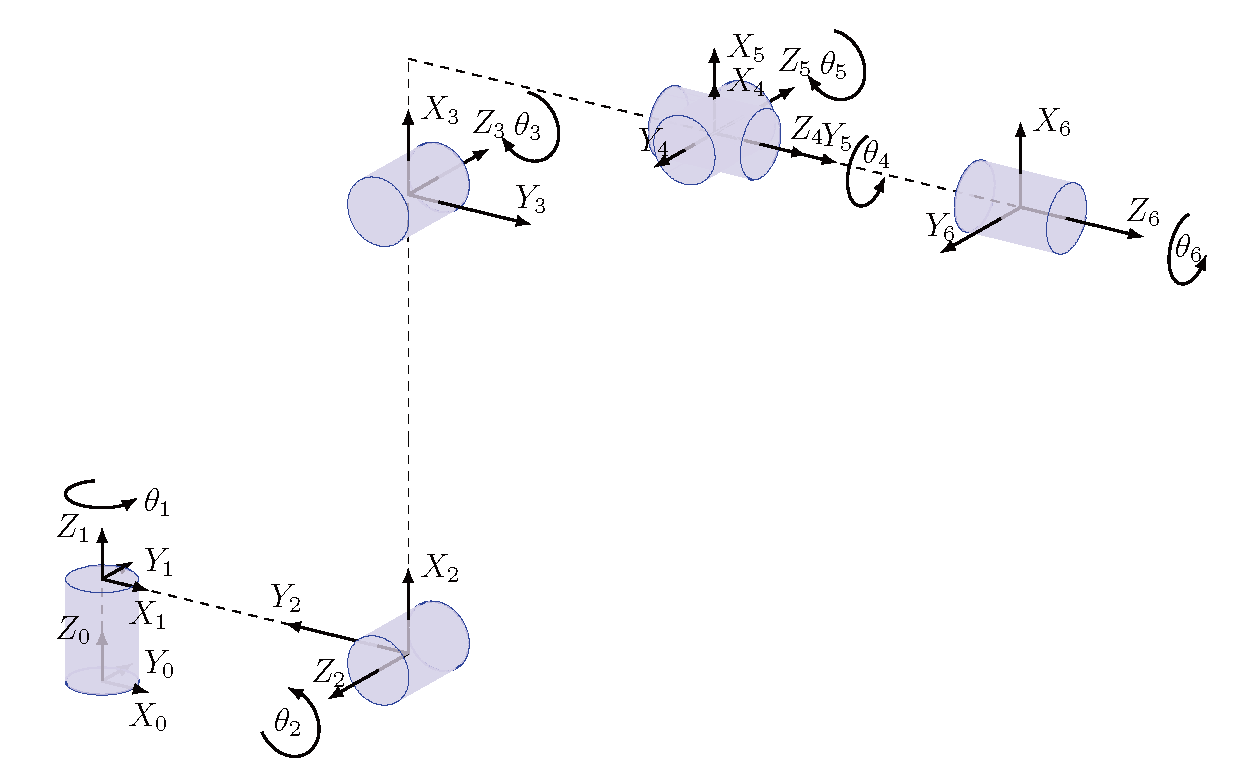
Tribo-dynamic Analysis and Motion Control of a Rotating Manipulator Based on the Toad and Temperature Dependent Friction Model
Proceedings of the Institution of Mechanical Engineers, Part J: Journal of Engineering Tribology, 2021.
2020
-
RAL & ICRA 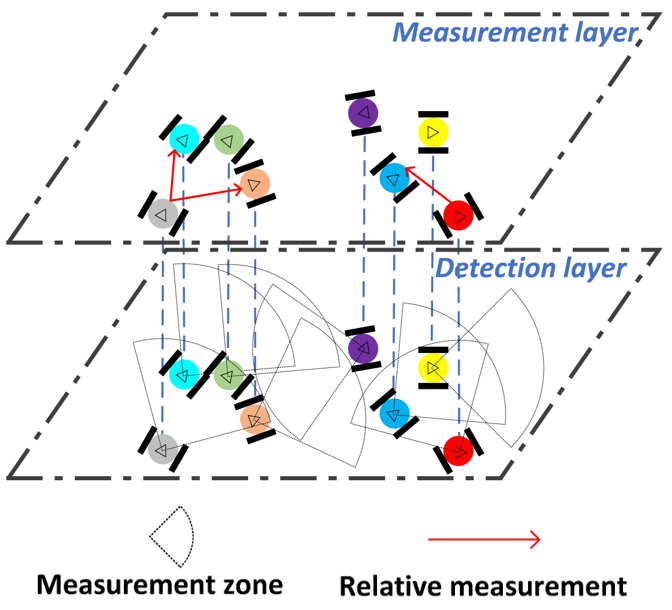
Measurement Scheduling for Cooperative Localization in Resource-Constrained Conditions
IEEE Robotics and Automation Letters, 2020.