Qi Yan

My name is Qi Yan (颜齐). I am a Ph.D. student in the Electrical and Computer Engineering department at the University of British Columbia, co-supervised by Prof. Renjie Liao and Prof. Lele Wang. I am broadly interested in machine learning, self-driving, and robotics.
Previously: I interned at Borealis AI in 2023, where I worked with Jiawei He, Lili Meng, and Tristan Sylvain on using language models for event forecasting. I obtained my master’s degree in Mechanical Engineering at EPFL in 2022, where I worked with Prof. Alexandre Alahi, Dr. Iordan Doytchinov, and Prof. Bertrand Merminod on robot trajectory planning and visual localization. I received my bachelor’s degree in engineering (honors) at Shanghai Jiao Tong University in 2019.
Please refer to my curriculum vitae if you are interested.
News
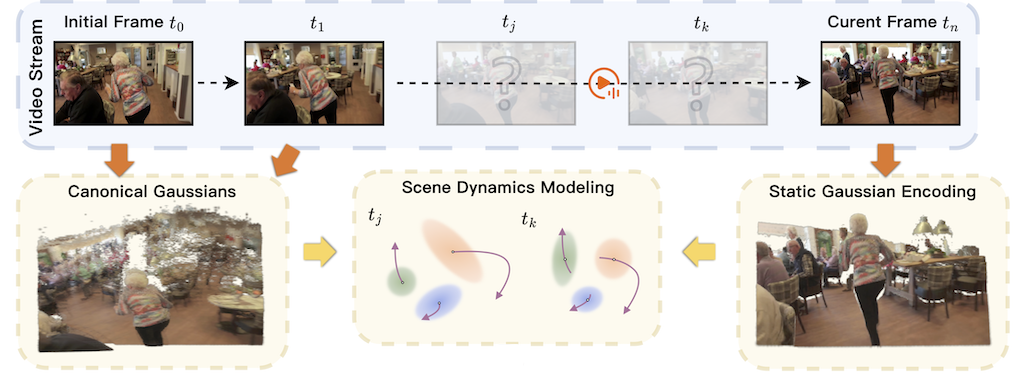
| Jan 26, 2026 | Our paper StreamSplat was accepted to ICLR 2026! |
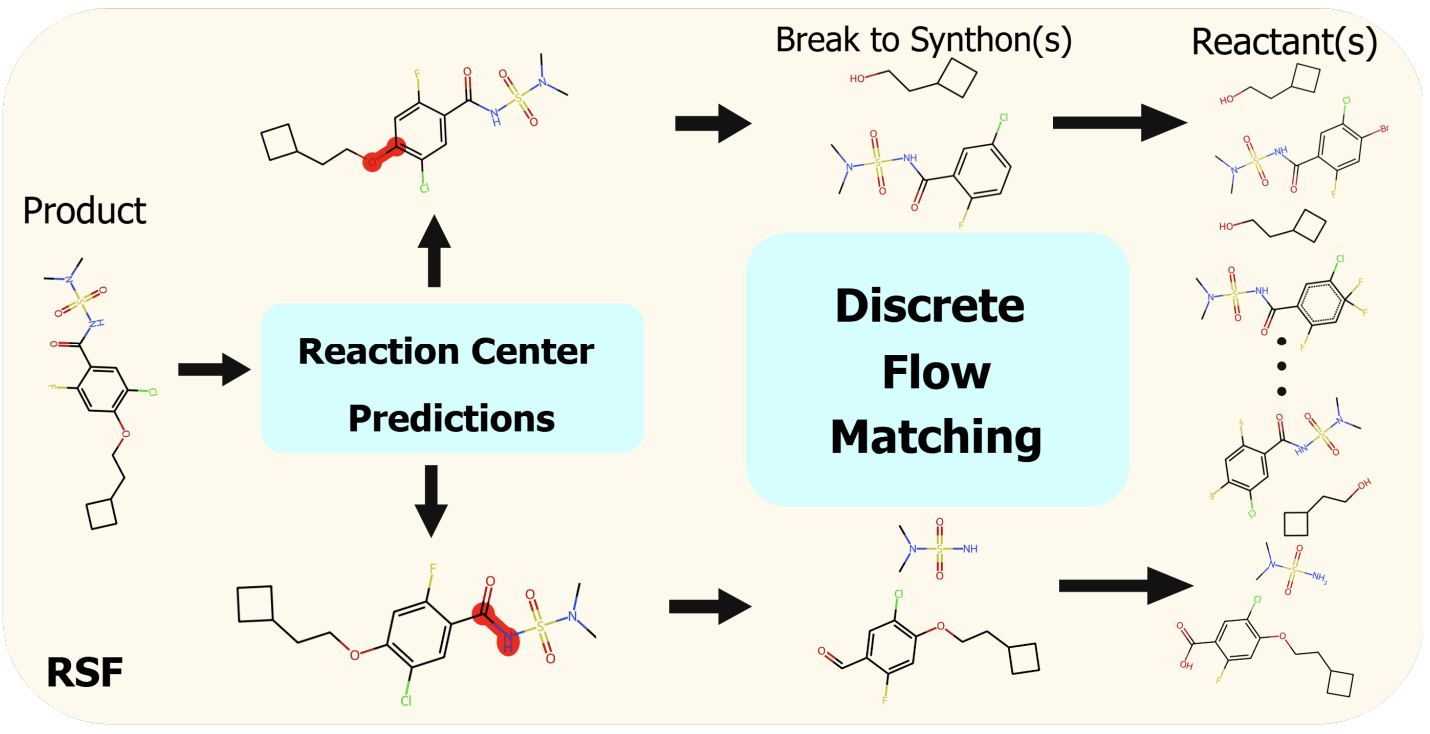
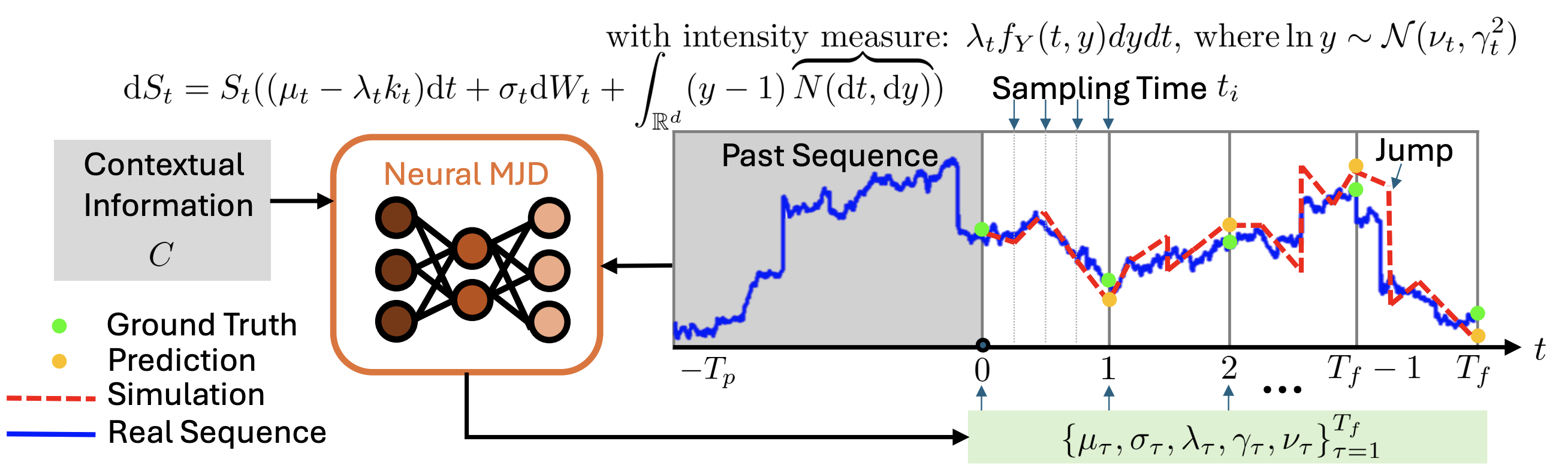
| Sep 18, 2025 | Our paper Neural MJD and RETRO SYNFLOW were accepted to NeurIPS 2025! |
| Aug 18, 2025 | Updated two blog posts on permutation invariant graph generation and conditional generative models for motion prediction. |
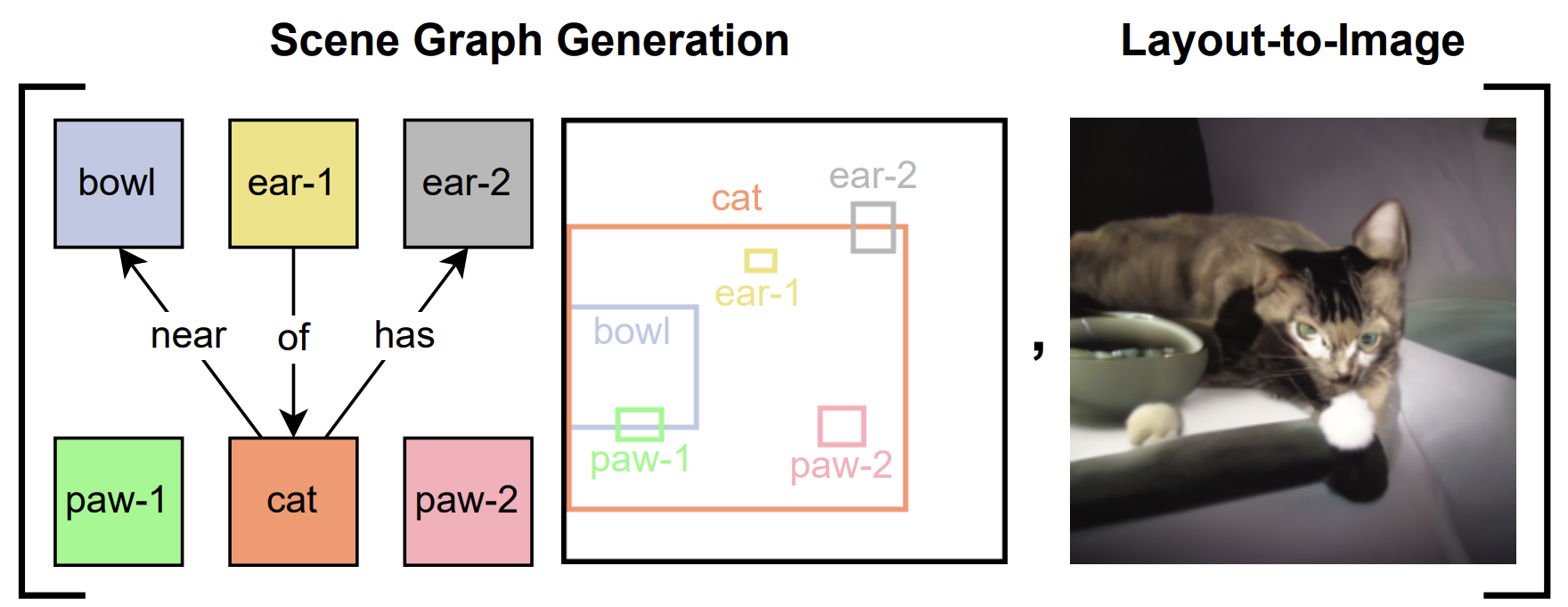
| Jul 08, 2025 | Our paper Joint Generative Modeling of Grounded Scene Graphs and Images via Diffusion Models was accepted to Transactions on Machine Learning Research (TMLR)! |
| Jun 16, 2025 | Our paper TrajFlow: Multi-modal Motion Prediction via Flow Matching was accepted to IROS 2025! |